パワーローター
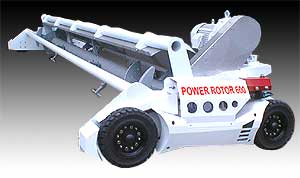
| <パワーローター>は、従来のコンピューター攪拌機をすべての面においてパワーアップしたもので、安全性・信頼性を大幅に向上させました。 家畜の糞尿や余剰汚泥等の有機物を、発酵に伴う熱と、太陽からのエネルギーを利用して効率よく急速に乾燥し、良質な発酵堆肥を製造する為の攪拌機です。IC(集積回路)に走行制御をさせ、機械自身が走行場所、平行度など様々な状況を的確に判断し、往復・右カーブ・左カーブ・非常停止などの行動を自動的に行う、攪拌ロボットで、従来のレール式攪拌機の最大の弱点である脱線やスリップ(車輪とレールとの抵抗が少ない為発生)をタイヤによる四輪駆動で防止し、そのうえ傾斜地での使用も可能となりました。もちろんレールが無いので脱線の心配もありません。 そしてパワーローターでは、各駆動部の構造をシンプルにし、日常のメンテナンスを容易にし、信頼性を向上させています。 |
| SENCER (センサー) |
 |
パワーローターの視覚。ハイレベルな安全性の源。 長年の実績を持つコンピューター、マシンの目に相当するセンサーは、刻々と変化する路面の状態や攪拌抵抗による走行方向の変化を電気信号に変換しコンピュータへ情報を送ります。 |
| CONTROL DEVICE (制御装置) |
 |
全ての情報を集中制御。高い信頼性を実現する頭脳。 各種センサーから送られてくる情報を、マイクロコントローラーでリアルタイム処理し各機構を完璧に制御します。また、デリケートな回路を守るために回路部を外気から完全にシャットアウトする構造や、電気回路はプリント配線化し、各制御ブロックごとの点検を容易にするなど、信頼性を飛躍的に向上させています。 |
| AGITATE PARTS(攪拌部) |
 |
一軸で攪拌と積み上げをするシンプル設計。 上位機種のMO-508やハイドロモンスター同様、油圧により攪拌軸を昇降させます。 特殊形状のスクリューで側面の攪拌と、積み上げ、搬送を行うため、コンクリート壁は不要になりました。 |
| OTHER TECNOLOGY |
 |
・積み上げ方式のため、発酵槽(壁)を作る必要がないので、設置費が約50%少なくなります。 ・モーター直結の減速機の採用によりメンテナンスを軽減化。 ・各チェーンの調整を簡素化。 ・走行車輪軸は、完全密閉構造で異物の進入を防止。 ・パワーローター自身が方向制御するため、レールおよび土間工事は不要。また、レールを使用しないため脱線事故はありません。 ・スクレーパーの取付で常時走行路の掃除を行います。 ・メンテナンスフリーの高性能フォークリフト用ノーパンクタイヤを採用。また4WD機構とブレーキ制御装置により、傾斜地でもご使用いただけます。(傾斜角度約4°) |
| SPECIFICATIONS (主要緒元) |
 |
仕様 攪拌用モーター 5.5kW 走行用モーター 0.4kW x 2台 攪拌幅 6m (5m) 機械全幅 7m (6m) ( )は500仕様 この仕様は改良のため予告無く変更する事があります様 |